|
Sunan Sun I am a Ph.D. student in Mechanical Engineering at GRASP Lab, University of Pennsylvania, advised by Prof. Nadia Figueroa. My research focuses on designing safe and efficient robotic control in human-centric environments. I am interested in combining learning-based methods with classic control theory to leverage the strengths of different approaches. Previously, I received my M.S. in Robotics from Penn and B.S. in Mechanical Engineering from Union College, NY. |

|
Research |
|
Elastic Motion Policy: An Adaptive Dynamical System for Robust and Efficient One-Shot Imitation Learning
Tianyu Li, Sunan Sun, Shubhodeep Shiv Aditya, Nadia Figueroa IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025 paper / website A one-shot imitation learning framework that can achieve real-time intra-task generalization while preserving theoretical guarantees. |
|
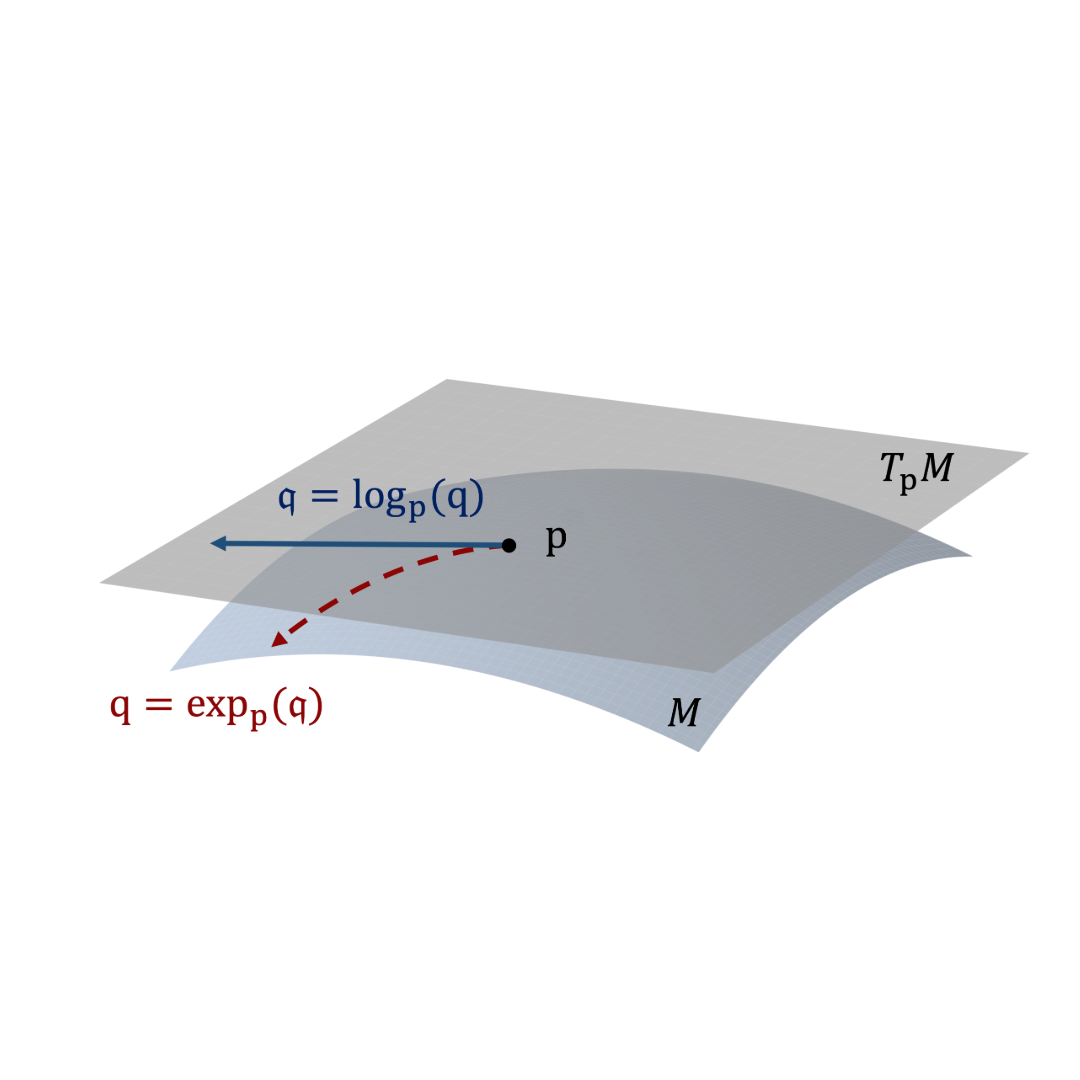
SE (3) Linear Parameter Varying Dynamical Systems for Globally Asymptotically Stable End-Effector Control
Sunan Sun, Nadia Figueroa IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 paper / code A novel statistical model that leverages the intrinsic statistics on Riemannian manifolds to incorporate orientation for stable robotic control. |

|
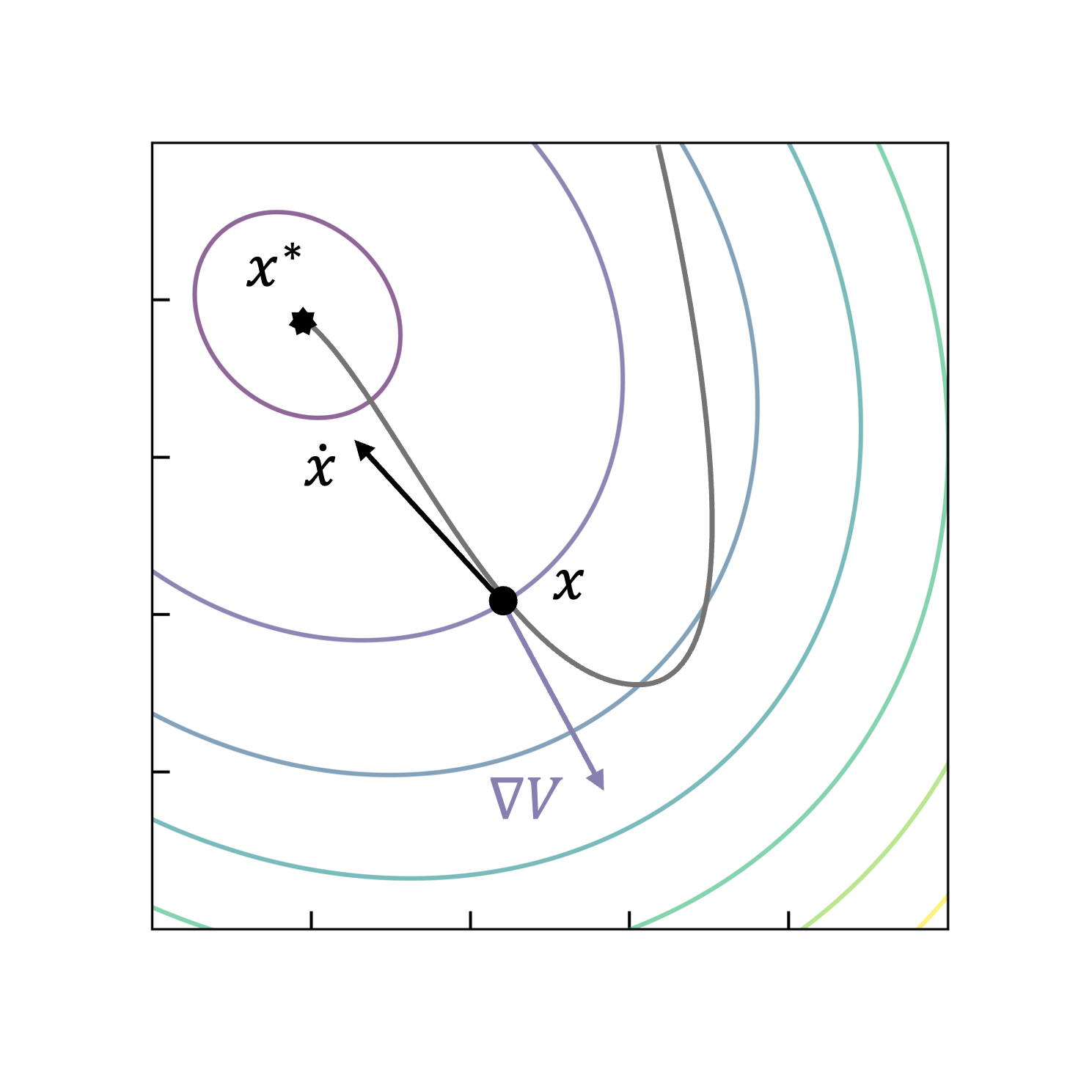
Directionality-Aware Mixture Model Parallel Sampling for Efficient Linear Parameter Varying Dynamical System Learning
Sunan Sun, Haihui Gao, Tianyu Li, Nadia Figueroa IEEE Robotics and Automation Letters (RA-L), May 2024 paper / code An efficient Learning from Demonstration (LfD) framework that encodes trajectory data into stable, time-invariant dynamical systems for reactive robotic control. |
Professional ServiceReviewer: RA-L, L4DC, IROS, ICRA |
|
Inspired by the template here. |